
ในงาน IEEE International Conference on Robotics and Automation (ICRA) ทีมนักวิจัยจาก MIT ได้ออกมานำเสนอความก้าวหน้าล่าสุดของหุ่นยนต์ Cheetah ซึ่งเป็นหุ่นยนต์ที่สร้างขึ้นโดยเลียนแบบการเคลื่อนไหวจริงของเสือชีตาห์ เจ้าหุ่นยนต์ที่ชื่อ Cheetah ตัวนี้สามารถวิ่งได้ด้วยความเร็วสูงสุดที่ 22 กิโลเมตรต่อชั่วโมง อีกทั้งยังมีประสิทธิภาพการใช้พลังงานเทียบเท่ากับสัตว์ที่มีขนาดใกล้เคียงกันในขณะกำลังวิ่งอีกด้วย
{kind=link}
อย่างไรก็ตามความเร็วที่เจ้า Cheetah ของ MIT ทำได้ที่ 22 กิโลเมตรต่อวินาทีนี้เป็นเพียงอันดับสองของโลกรองจากหุ่นยนต์ที่ชื่อว่า Cheetah เช่นกันของ Boston Dynamics ซึ่งวิ่งได้ที่ความเร็วเป็นสองเท่าของ Cheetah จาก MIT สิ่งที่น่าสนใจในการทดสอบความเร็วของหุ่นยนต์จากทั้งฝั่งของ MIT และ Boston Dynamic ก็คือหุ่นยนต์ได้ถูกรั้งเอาไว้กับคานเหนือหัวเพื่อป้องกันการกลิ้ง และการเคลื่อนที่ไปทางด้านข้าง พูดได้อีกอย่างหนึ่งก็คือหุ่นยนต์ Cheetah จากทั้งสองค่ายนั้นยังไม่มีความสามารถในการทรงตัวเองได้นั่นเอง
แม้ว่าจะมีความเป็นไปได้ที่เราจะได้เห็นหุ่นยนต์ที่สามารถวิ่งด้วยความเร็วสูงมากกว่านี้ แต่ความเร็วไม่ใช่ปัจจัยสำคัญเพียงอย่างเดียวของการแข่งขันระหว่าง MIT กับ Boston Dynamic
ในขณะที่หุ่นยนต์ของ Boston Dynamic ซึ่งใช้กลไกไฮดรอลิกในการขับเคลื่อนเป็นหลักยังคงต้องอาศัยแหล่งพลังงานจากภายนอก ทางหุ่นยนต์ของ MIT มีประสิทธิภาพเพียงพอที่จะใช้พลังงานจากแบตเตอรี่จากตัวหุ่นยนต์เองเท่านั้น หุ่นยนต์ Cheetah ของ MIT มีทั้งขนาด และ น้ำหนักเทียบเท่ากับเสือชีตาห์จริง ๆ และใช้พลังงานในการวิ่งที่ความเร็วสูงสุด (22 กิโลเมตรต่อชั่วโมง) เพียง 1 กิโลวัตต์เท่านั้น ซึ่งเมื่อคำนวนเป็นตัวเลขต้นทุนการเคลื่อนที่ (COT, Cost Of Transport) โดยการนำพลังงานที่ใช้หารด้วยน้ำหนัก และความเร็ว (พลังงาน / (น้ำหนัก x ความเร็ว)) แล้วจะได้ตัวเลขที่ 0.52 ซึ่งเป็นค่าที่ใกล้เคียงกับสัตว์ที่มีขนาดไล่เลี่ยกัน เพื่อเป็นการเปรียบเทียบให้เห็นภาพ หุ่นยนต์ Asimo ของ Honda มีค่า COT อยู่ที่ 2 และ BigDog ของ Boston Dynamic มีค่า COT มากถึง 15 เลยทีเดียว

ทีมพัฒนาหุ่นยนต์ Cheetah ของ MIT นำโดย Prof.Sangbae Kim เชื่อว่ามอเตอร์ไฟฟ้าเป็นตัวเลือกที่ดีกว่ากลไกไฮดรอลิก แม้ว่ามอเตอร์ไฟฟ้าแบบเก่านั้นจะมีจุดด้อยในการทำงานที่ต้องการความเร็วสูง และใช้แรงมาก (high speed and high torque) ซึ่งเป็นสาเหตุที่ทำให้นักวิจัยด้านหุ่นยนต์หันมาให้ความสนใจกลไกไฮดรอลิกกันมากขึ้น แต่ Prof.Kim ไม่เห็นด้วยกับแนวคิดดังกล่าว
ทีมนักวิจัยของ Prof.Kim ได้พัฒนามอเตอร์ไฟฟ้า 3 เฟสซิงโครนัสแบบแม่เหล็กถาวร (three phase permanent magnet synchronous motor) ที่สามารถออกแรงได้มากกว่ามอเตอร์ที่วางจำหน่ายอยู่ในท้องตลาดทั่วไปถึงหนึ่งเท่าตัวสำหรับใช้ในหุ่นยนต์ตัวนี้ และยังตั้งใจที่จะพัฒนามอเตอร์ดังกล่าวต่อไปอีกเพื่อลดค่า COT ของ Cheetah ให้ลงมาอยู่ที่ 0.33
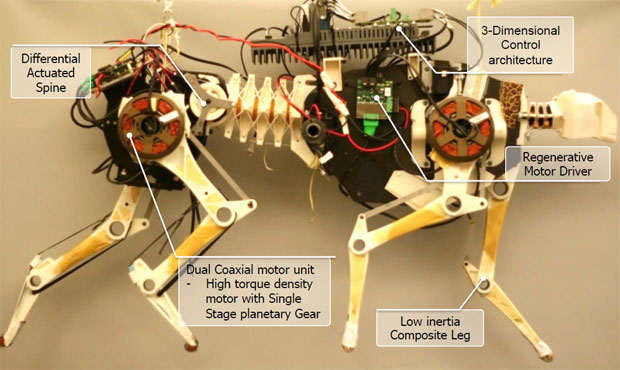
นอกเหนือไปจากการพัฒนามอเตอร์ที่มีประสิทธิภาพสูงแล้ว ทีมนักวิจัยของ Prof.Kim ยังค้นหาไปถึงต้นเหตุที่ทำให้เกิดความสูญเปล่าของพลังงาน และหาทางจำกัดออกไปให้ได้มากที่สุด ยกตัวอย่างเช่นการใช้ regenerative motor เพื่อป้อนพลังงานกลับในขณะที่เท้าของหุ่นยนต์กระทบพื้น โครงสร้างของหุ่นยนต์ก็ใช้วัสดุสังเคราะห์น้ำหนักเบาอย่าง Kevlar และ polyurethane foam อีกทั้งยังมีโครงสร้างกระดูกสันหลังที่จะเคลื่อนไหวตามจังหวะการเคลื่อนที่ของขา เมื่อรวมเทคนิคทุกอย่างเข้าด้วยกัน ผลก็คือทำให้เจ้า Cheetah สามารถวิ่งที่ความเร็ว 8.3 กิโลเมตรต่อชั่วโมง ได้นานถึง 1 ชั่วโมง 23 นาที หรือเป็นระยะทางถึงประมาณ 10 กิโลเมตรด้วยกัน โดยใช้แบตเตอรี่ที่มีน้ำหนักเพียงแค่ 3 กิโลกรัมเท่านั้น!

ผู้อ่านสามารถอ่านรายละเอียดเพิ่มเดิมได้จากวารสารวิชาการภายใต้หัวข้อ “Design Principles for Highly Efficient Quadrupeds and Implementation on the MIT Cheetah Robot”
ที่มาและภาพ IEEE Spectrum
Latest posts by Poon Tawit (see all)
- หุ่นยนต์ที่ถูกออกแบบให้เดินได้เหมือนมนุษย์มากยิ่งขึ้น - 2013/07/11
- Cheetah จาก MIT มีประสิทธิภาพสูงขึ้นไปอีกขั้น - 2013/07/11
- Grizzly หุ่นยนต์ยักษ์ใหญ่จาก Clearpath Robotics - 2013/03/31